Puntos Lagrange del Sistema Tierra-Sol
Un sistema mecįnico con tres objetos, digamos Tierra, Luna y Sol, constituye un problema de tres cuerpos. El problema de tres cuerpos es y sigue siendo famoso en los cķrculos fķsico y matemįtico. Finalmente en la década de 1950, se logró una elegante prueba de que es un problema imposible de resolver. Sin embargo, pueden ser muy śtiles soluciones aproximadas, particularmente cuando las masas de los tres objetos son muy diferentes.
Los matemįticos del siglo 18 Leonhard Euler y Joseph-Louis Lagrange descubrieron que habķa cinco puntos especiales en este marco de referencia giratorio, donde podrķa mantenersee un equilibrio gravitacional. Estos cinco puntos fueron llamados puntos de Lagrange y numerados de L1 a L5. Es decir, un objeto colocado en cualquiera de estos cinco puntos del marco de referencia giratorio se quedarķa allķ, con todas las fuerzas efectivas cancelįndose entre sķ. Los puntos de Lagrange se pueden visualizar como superficies equipotenciales de tres cuerpos. Los objetos colocados en los puntos de Lagrange del sistema Tierra-Luna se podrķan mantener allķ y entonces orbitar alrededor del Sol, manteniendo la misma posición relativa con respecto al sistema Tierra-Luna.
En los śltimos ańos una serie de misiones de satélites de exploración espacial han hecho uso de los puntos de Lagrange Tierra-Sol para el posicionamiento de los satélites de observación. El diagrama de abajo presenta la geometrķa general, pero la gran diferencia de masa entre el Sol y la Tierra hace que sea difķcil dibujar a escala los puntos de Lagrange Tierra-Sol. Mientras que L3 estarķa en el lado opuesto del Sol y por lo tanto obviamente no serķa śtil, los puntos de Lagrange L1 y L2 se han utilizado para los satélites de observación.
 | Los puntos de Lagrange L4 y L5 constituyen puntos de equilibrio estable, de manera que un objeto colocado allķ se mantendrķa en una órbita estable con respecto a M1 y M2. Las pequeńas desviaciones afuera de L4 o L5, originarķan una fuerza de recuperación efectiva que llevarķa al satélite de nuevo al punto estable. |
Los puntos de Lagrange L1, L2 y L3 no parecen ser tan śtiles, ya que son puntos de equilibrio inestable. Al igual que el equilibrio de un lįpiz sobre su punta, el manteniendo de un satélite es teóricamente posible, pero cualquier influencia perturbadora lo conducirķa fuera del equilibrio. Sin embargo, en la prįctica, estos puntos de Lagrange han demostrado ser muy śtiles. De hecho se puede hacer una nave espacial que ejecute una pequeńa órbita alrededor de uno de estos puntos de Lagrange con muy pequeńo gasto de energķa. Estos puntos han proporcionado lugares śtiles para el "aparcamiento" de una nave espacial para las observaciones. Estas órbitas alrededor de L1 y L2 son a menudo llamadas "órbitas de halo".
El punto de Lagrange Tierra-Sol L2 se ha utilizado para la Wilkinson Microwave Anisotropy Probe (WMAP), Sonda de Anisotropķa de Microondas Wilkinson). L2 estį posicionada fuera de la órbita de la Tierra de manera que la WMAP siempre estį encarada afuera tanto del Sol como de la Tierra, una caracterķstica importante para una sonda de espacio profundo, que puede emplear detectores ultrasensibles, sin el peligro de que sean "cegados" observando el Sol o la Tierra.
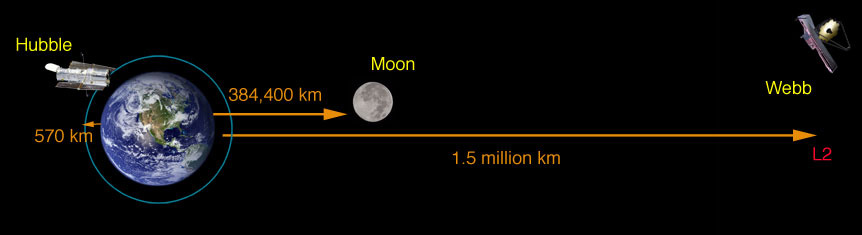
Este punto L2 también se utilizó para el satélite Planck para el estudio del Fondo Cósmico de Microondas, y se utilizarį para el Telescopio Espacial James Webb.
 | El punto de Lagrange del sistema Tierra-Sol L2, estį situado hacia el exterior de la Tierra alrededor del 1% de la distancia Tierra-Sol. |
Imįgenes de la NASA
Referencias:
Conceptos de Órbitas
Referencia
Klarreich
| HyperPhysics*****Mecįnica*****Órbitas | M Olmo R Nave |