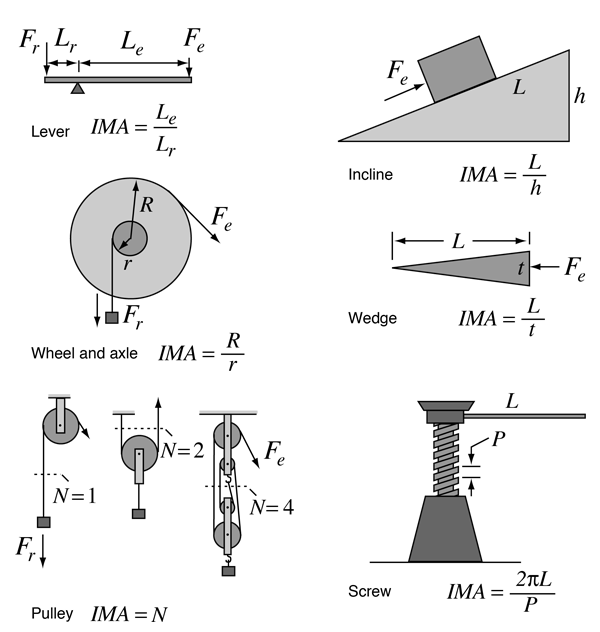
It is traditional to point to a set of simple machines from which more complex machines can be fashioned. One way to characterize a "simple" machine is to say that it has no internal source of energy. It may nevertheless be very useful in that it multiply the input force to accomplish a task. The factor by which it multiplies the force is often called the "mechanical advantage". If you idealize the machine by neglecting friction, then you can state an "ideal mechanical advantage" or IMA for the machine. A typical grouping of simple machines is shown below.